Project overview
Development of a structured images projector used to provide reference patterns for 3D artificial vision’s cameras.
The projector is the illumination section of a system for the recognition of 3D objects: the system is used to detect presence, location and orientation of the objects
- The project aims to meet the necessary lighting and versatility characteristics of the most modern vision software-hardware systems.
Project development
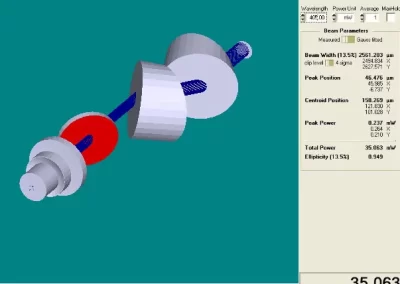
It started from the analysis of system needs in terms of pattern resolution, brightness and contrast of the projected image, object size and distance from the cameras, strobo synchronization, image acquisition time:
- Identification of a high power LED as a illumination source, a silkscreen printed glass for the image to be projected and size of possible projection targets.
- Design of the optical scheme including the light condensation system and the projection system.
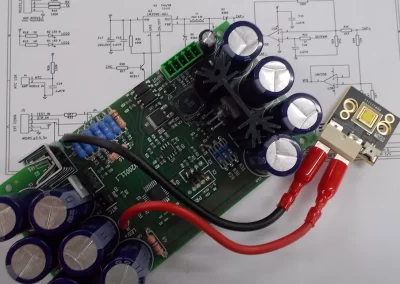
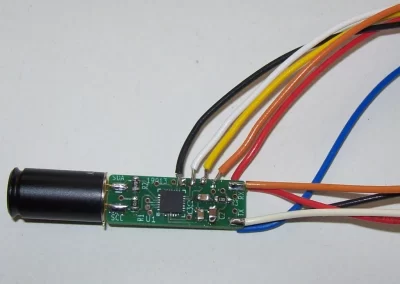
- Design of Lighting Led Driver Electronic Board and stroboscopic light synchronisation mechanism
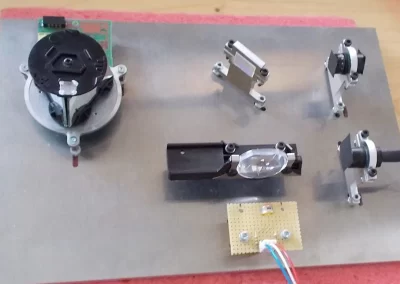
- Design of the opto mechanics to support optical components
- Development of a prototype for functional testing, system testing and verification.
Description of the application
The continuous and rapid evolution of 3D vision systems requires versatile and complete lighting equipments that can be adapted to the needs that arise as a result of different application aspects. The design consider the shape, position and distance of the objects to be detected, the speed of image acquisition, synchronization of the strobe with camera shutter, ambient lighting variables, camera sensitivity and lens rendering. The developed system is able to meet many different requirements; flexibility of the optics that can mount different lenses, using standard C-mount camera lenses. Different lighting intensities of the patterns are possible, thanks to the possibility to vary the relative positions of the optic components. Interfacing with main system is obtained by microprocessor control that allows to synchronize light pulses with camera shutter and to remote adjust pulse amplitude and duration. It’s possible to accommodate and implement many future needs that may arise, by varying internal software
Results
The prototype permitted to test the different solutions under various conditions: it works well with projection distances from 0.3 to 3m, with 8 to 75 mm focal lenses, with 2/3” and 1” C-mount lenses, with patterns of different resolution, synchronizing at different acquisition speeds. The project proved to be reliable and flexible.